
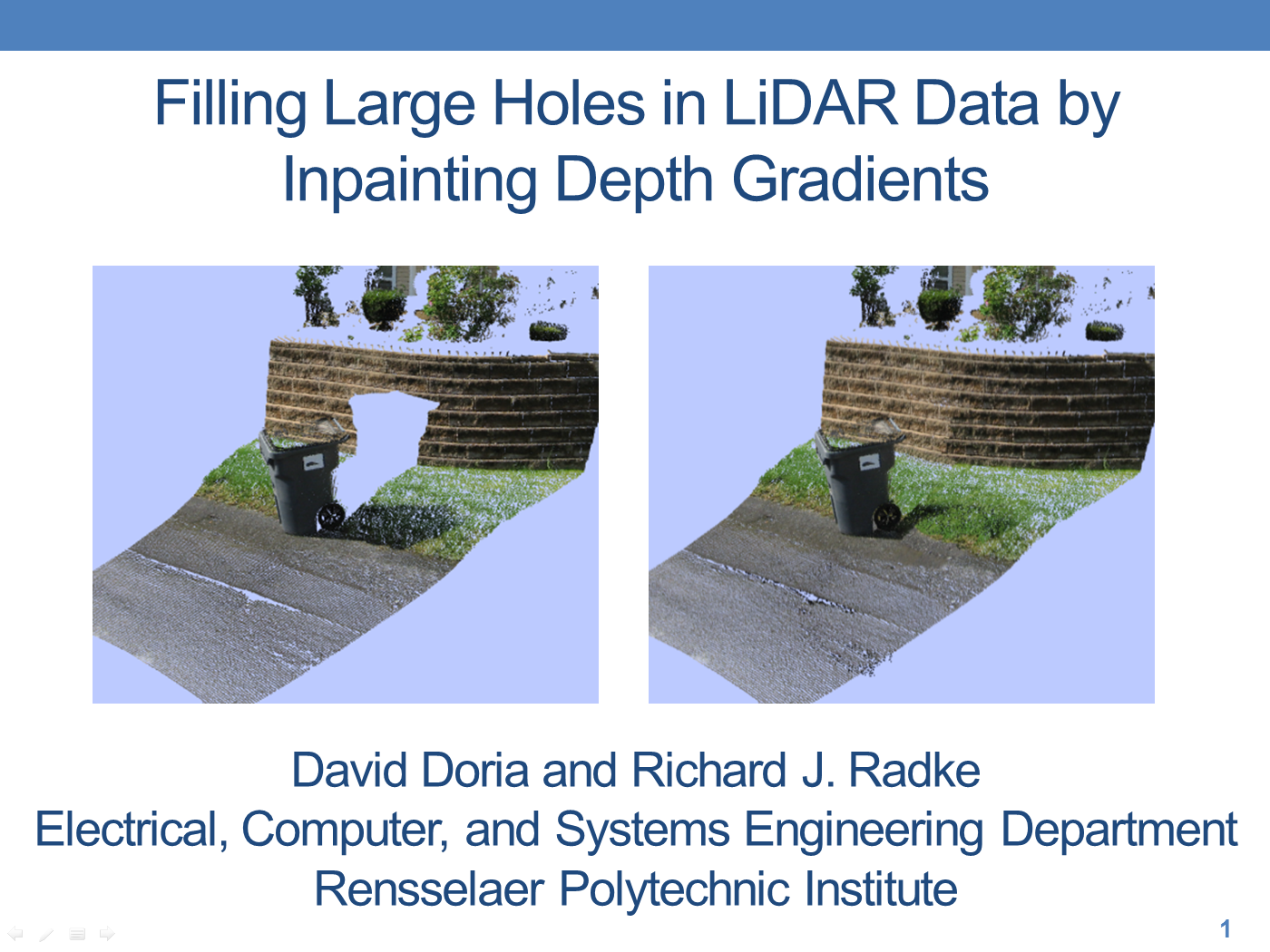


Filling Large Holes in LiDAR Data By Inpainting Depth Gradients Presentation
This presentation was given at the Point Cloud Processing Workshop in conjunction with the Computer Vision and Pattern Recognition (CVPR) conference in Providence, Rhode Island (June 2012). It summarizes the work in “Filling Large Holes in LiDAR Data By Inpainting Depth Gradients” by D. Doria and R. J. Radke.
Leave A Comment