

David Doria, “A Synthetic LiDAR Scanner for VTK“. The Insight Journal, September 2009
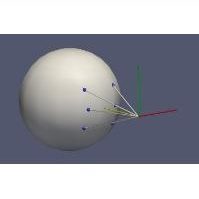
In recent years, Light Detection and Ranging (LiDAR) scanners have become more prevalent in the scientific community. They capture a “2.5-D” image of a scene by sending out thousands of laser pulses and using time-of-flight calculations to determine the distance to the first reflecting surface in the scene. Rather than setting up a collection of objects in real life and actually sending lasers into the scene, one can simply create a scene out of 3d models and “scan” it by casting rays at the models. This is a great resource for any researchers who work with 3D model/surface/point data and LiDAR data. The synthetic scanner can be used to produce data sets for which a ground truth is known in order to ensure algorithms are behaving properly before moving to “real” LiDAR scans. Also, noise can be added to the points to attempt to simulate a real LiDAR scan for researchers who do not have access to the very expensive equipment required to obtain real scans.




Leave A Comment